技術解説 ステッピングモータの基本
モータ制御
ステッピングモータの基本
今回は主に位置決めなどに使われるステッピングモータの種類と構造を紹介します。
9章 ステッピングモータの制御
9-1 ステッピングモータの基本
ステッピングモータは、コイル各相に順番にパルス状に通電し、パルス列入力に同期動作させるモータです。
運転方法としては、DCモータやブラシレスモータと異なりパルス列入力を連続すれば、予め設定した運転パターンに従い回転し、パルス列入力を停止すれば、モータも停止します。制御パターンで正転、逆転の制御が可能になります。また、パルス周波数で回転速度を制御できます。この様にパルスで制御することから、パルスモータ、ステップモータ、ステッパモータとも呼ばれます。
ステッピングモータの種類と構造
ステッピングモータは、構造別に下記の3種類があります。
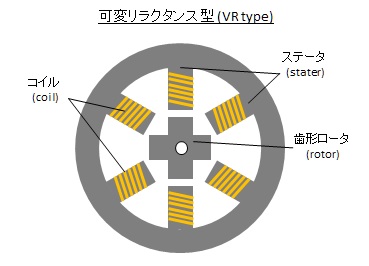
- ①可変リラクタンス(VR)型
- 可変リラクタンス(VR)型は、永久磁石を用いない構造で、複数の歯形を持つ軟鉄製のロータ(回転子)と、ステータ(固定子)に巻いた電磁コイルで構成されます。ステータコイルに電流が流れると電磁力により励磁され、ロータの歯がステータ極に引き寄せられることによって回転します。
-
- VR型の利点は、永久磁石が必要ないことですが、欠点は分解能を高くするには、数多く細かな歯形の精密加工とステータとロータ間のギャップ長を短くすることが必要で低コスト化、小型化が難しいことです。
- ②永久磁石(PM)型
- VR型とは別に、永久磁石ロータを利用したものがPM型(Permanent Magnet stepping motor)です。2相構造(4コイルステータと2極磁石ロータの組み合わせ)が典型です。ロータにはVRモータのような機械歯はなく、代わりにS極とN極に磁化されています。この磁化されたロータ極によって磁束密度が増大されているため、PM型モータはVRモータに比べ強いトルクを発生します。
-

- ③ハイブリッド(HB)型
- VR型とPM型の両方の利点を生かした複合構造のものが、ハイブリッド(hybrid stepping motor)型です。HB型は、現在、最も普及しているものです。
-




ステッピングモータの基本システム
- ステッピングモータの制御システム図を示します。
- ①パルス列指令を入力
- ②ステッパコントローラでA,Bコイルへの通電位相パターンをデコード
- ③H-SWドライバ(バイポーラの場合)で電力増幅しモータコイルを通電

オープンループ動作
ステッピングモータの最大の特徴は、基本的にオープンループ制御で精密な位置制御が可能な点で、ステップパルスの状況を把握するだけで、位置を知ることができます。
この場合のオープンループ制御とは、位置情報のフィードバックが不要ということです。この特長を利用して、高価な変位センサー、エンコーダなどの部品を組み合わせた位置検出機構や、フィードバック処理制御回路が不要になり、低コストかつ、簡単な構成で位置制御が実現できます。
ステップ分解能
ステッピングモータの仕様の一つにステップ数があります。ステップ数は、ロータ1回転(360deg)をいくつに分割できるかを表しています。例えば、200ステップのモータであれば、1ステップ当たりの角度は、360deg÷200=1.8deg になります。つまり、モータの基本ステップ分解能=1.8degと表現します。
例えば、モータ軸を90deg進めるには、 90deg ÷ 1.8deg = 50setpと50ステップ必要なので、50個のパルスを入力すれば良いことになります。

ステッピングモータの長所と短所
- 長所
- ・オープンループ制御で簡単に精密な位置決め運転が行える
- ・モータ回転速度は、入力パルス周波数に比例するので簡単に速度制御ができる
- ・モータ回転軸角度は、入力パルス数に比例するので簡単に角度位置決めができる
- ・モータにブラシを用いないので寿命が長く信頼性が高い
- 短所
- ・コギングが大きいので高速、急加減速運転が苦手(脱調し易い)
- ・コギングが大きいので連続回転時に振動リップルが大きい
- ・位置決め保持(ロータ停止固定)時には電流が流れ続けるため、電力消費が多く発熱が大きい
ステッピングモータの使用例
簡単な仕組みで低コスト、小型に構成できるので、下記に示す様に民生、工業、産業用など多くの幅広い分野で使用されています。
- ・プリンタ、スキャナのヘッド位置決め、紙送りメカ
- ・スチルカメラのレンズメカ(AF,Zoom,IRIS)
- ・セキュリティカメラのレンズメカ、パン/チルト制御メカ
- ・エアコンの風向ルーバ
- ・スロットマシンのリールドラム
- ・天体自動追尾型望遠鏡の追尾モータ
- ・顕微鏡ステージ